
최근 10개 글 보기
모든 글 보기
 차완기 - @8/20/2023, 3:06:00 PM
차완기 - @8/20/2023, 3:06:00 PM 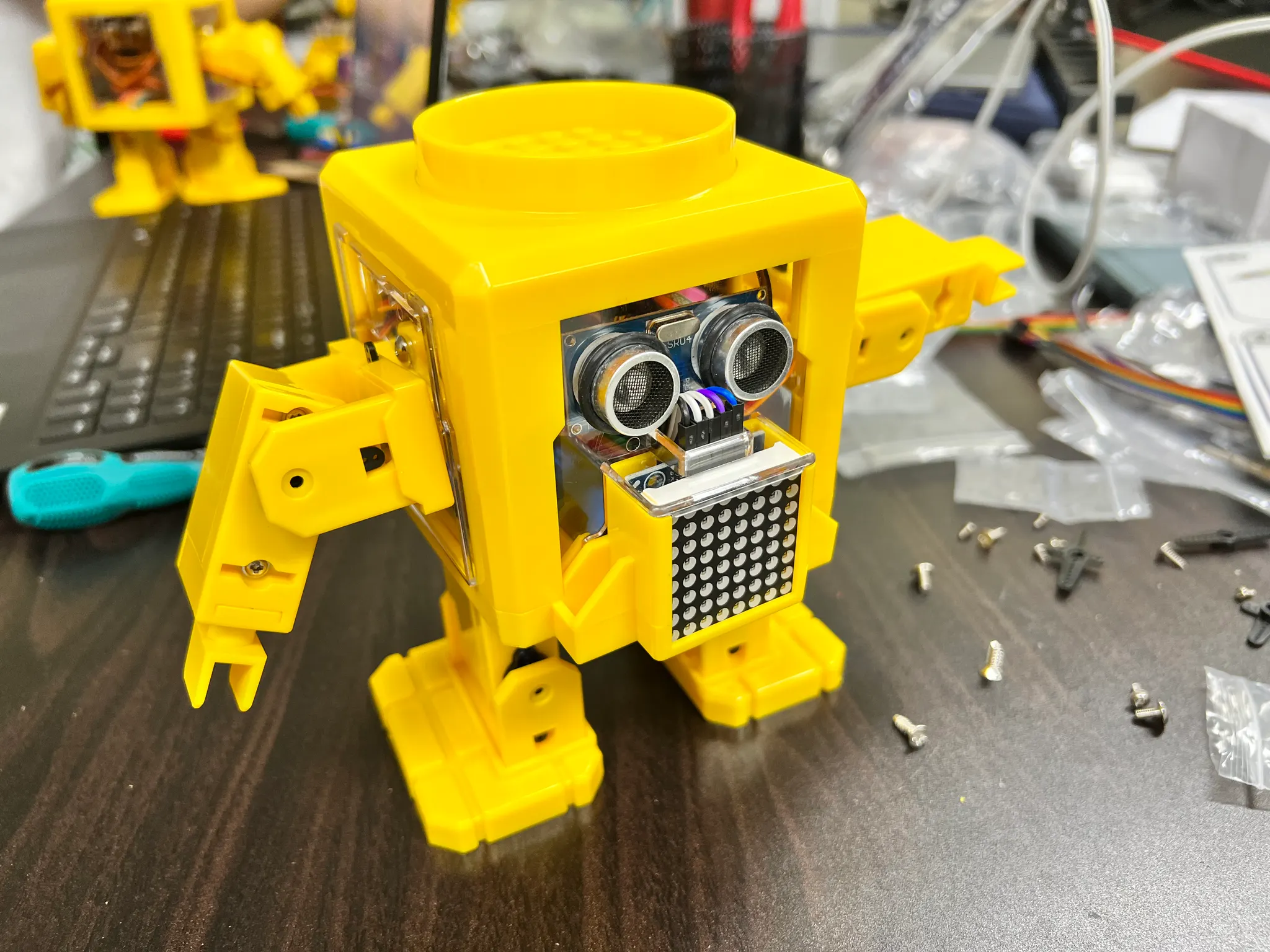
진행 방향 변경
2편인 [AiMate] 2. 하드웨어 설계-1 : 두뇌 풀가동에서 “눈에 보이는 실물이 없으면 흥미가 급격하게 떨어진다”고 하였는데요, 그 내용이 실제로 일어나게 되었습니다. 지난 몇주 간 PCB 설계와 주문, 그리고 조립까지는 빠르게 진행되었지만, 그 뒤로 프로젝트에 할애할 시간이 부족해 외형을 위한 3D 설계 진도가 많이 느려지게 되었습니다.
외형 설계에 너무 많은 시간을 투자하고 있다는 생각이 들어 프로젝트의 진행 방향을 변경하기로 하였습니다.
바로 외형을 직접 만드는 것이 아닌, 구매해 활용하는 것입니다.
사서 써먹자!
현재 동아리 구성원의 대다수는 로봇, 그중에서도 다관절 로봇은 더더욱 처음 접해보는 상태였습니다.
[AiMate] 5. 다시 처음으로, 프로젝트 재기획

 차완기 - @6/7/2023, 10:11:00 PM
차완기 - @6/7/2023, 10:11:00 PM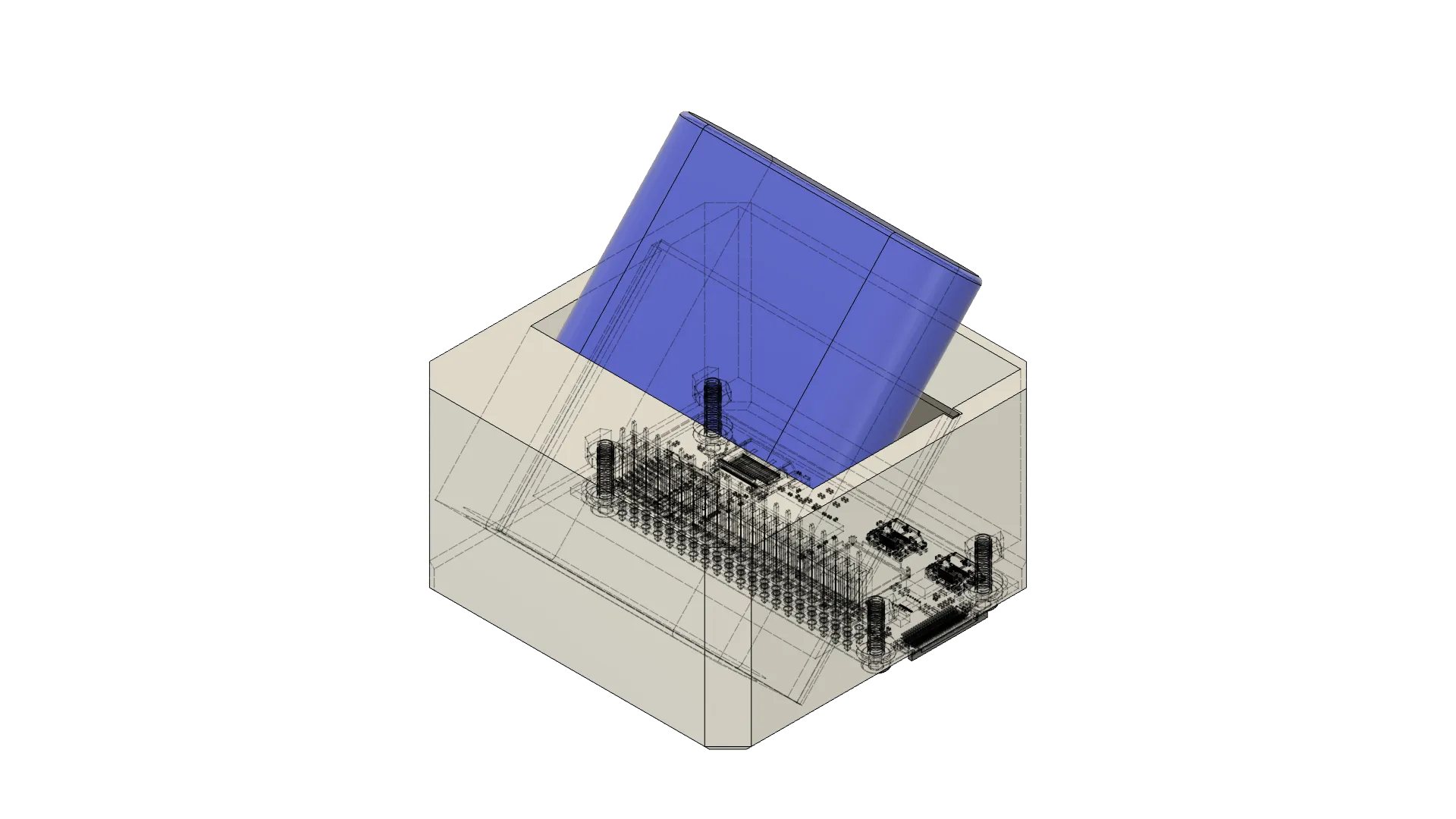
아무리 프로젝트에 애정을 가지고 있다 하더라도 손으로 만져지는 진행사항이 없으면 결국 어느 순간 지치게 됩니다. 그렇게 되지 않기 위해 서둘러 하드웨어 설계를 시작해 보았습니다.
고려 사항
지난 포스팅에서 밝힌 바와 같이 시행착오를 줄이기 위해 ottodiy 프로젝트의 Otto 로봇을 참고하기로 하였습니다. 하지만 세부적인 내용은 Otto와 크게 다르기 때문에 많은 수정이 필요하거나 처음부터 설계를 해야 할 가능성이 있어 설계 시작에 앞서 Otto와 AiMate의 차이점을 정리해 보았습니다.
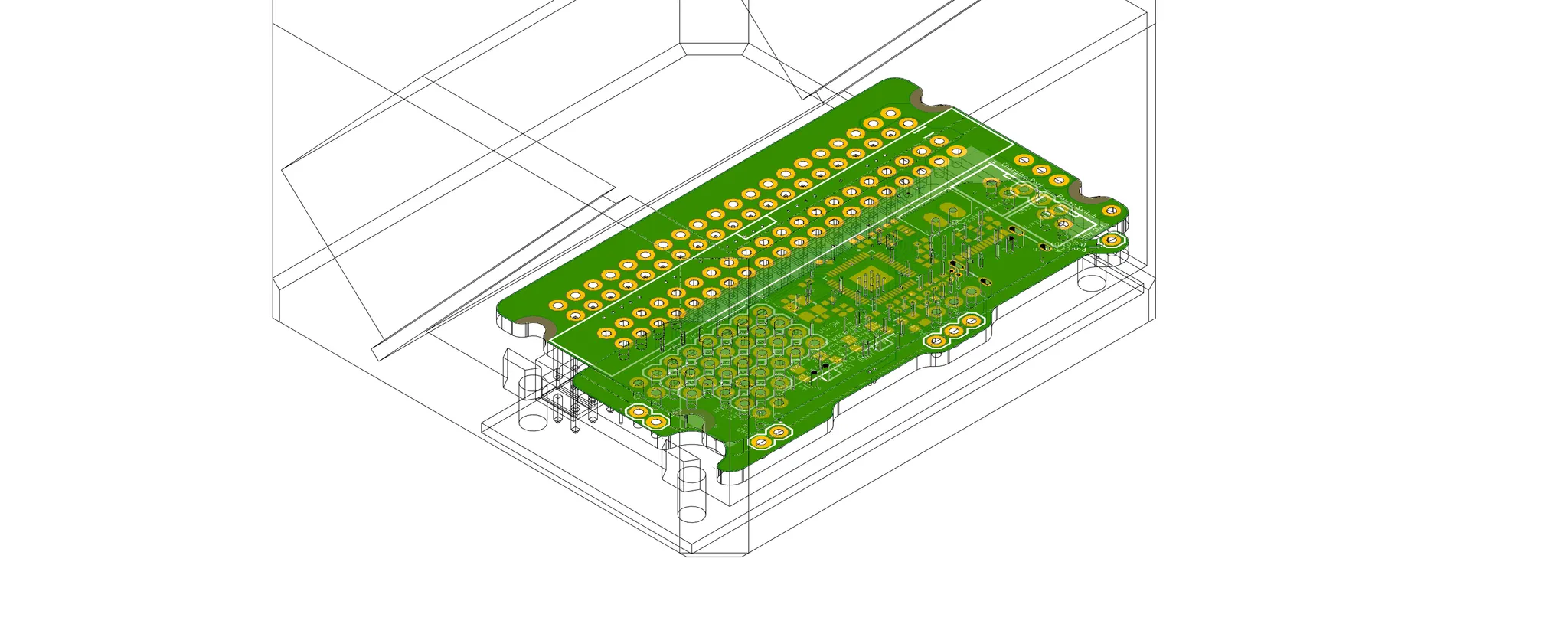
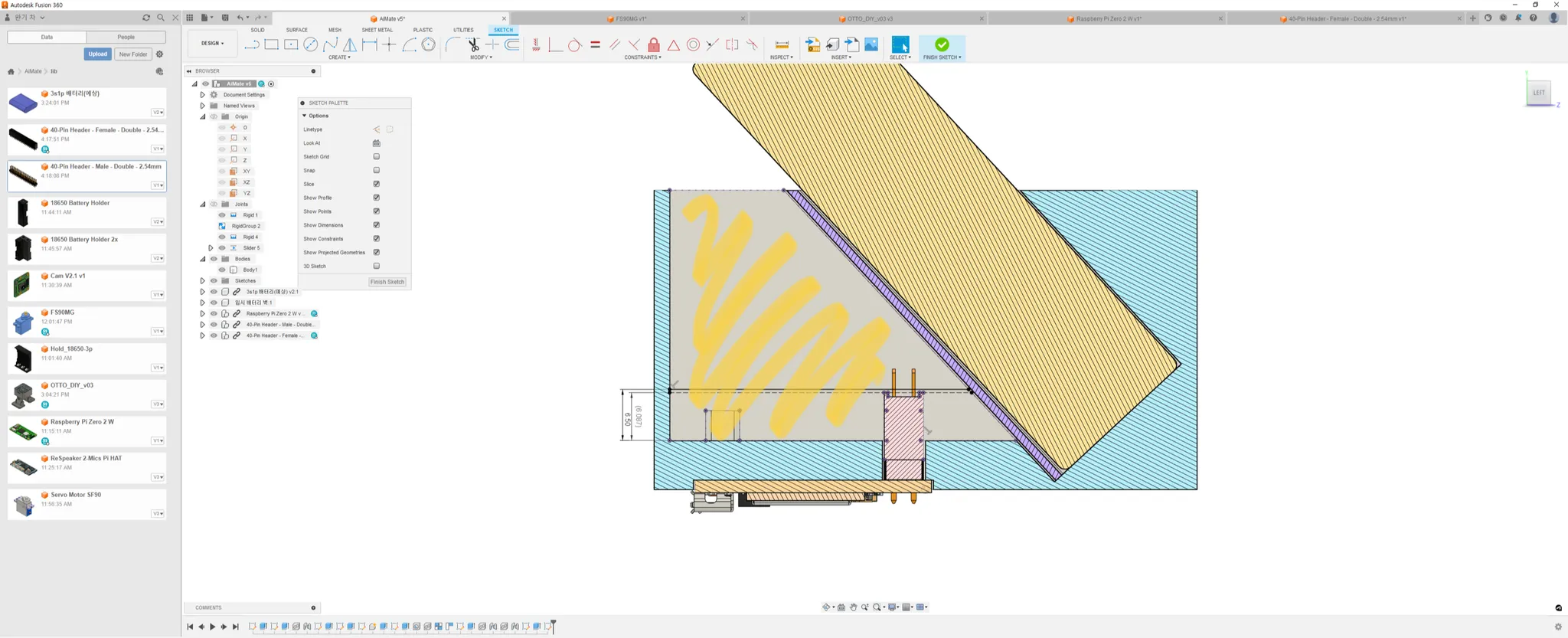
라즈베리파이(SBC)와 하드웨어 제어를 위한 MCU, AA배터리보다 훨씬 큰 18650배터리, 수많은 센서들까지 수많은 부품이 사용되기 때문에 공간을 효율적으로 활용해야 했습니다.
크기를 늘리면 모터가 커져야 하고 그러면 배터리가 커져야 하는 딜레마를 해결하는것이 가장 어려웠습니다. 결국 설계를 진행하며 초기 계획과는 다르게 많은 부품을 변경해야 했습니다.
이슈-1 배터리
[AiMate] 2. 하드웨어 설계-1 : 두뇌 풀가동