
 차완기 - @10/29/2023, 11:33:00 AM
차완기 - @10/29/2023, 11:33:00 AM QR 링크 펼치기
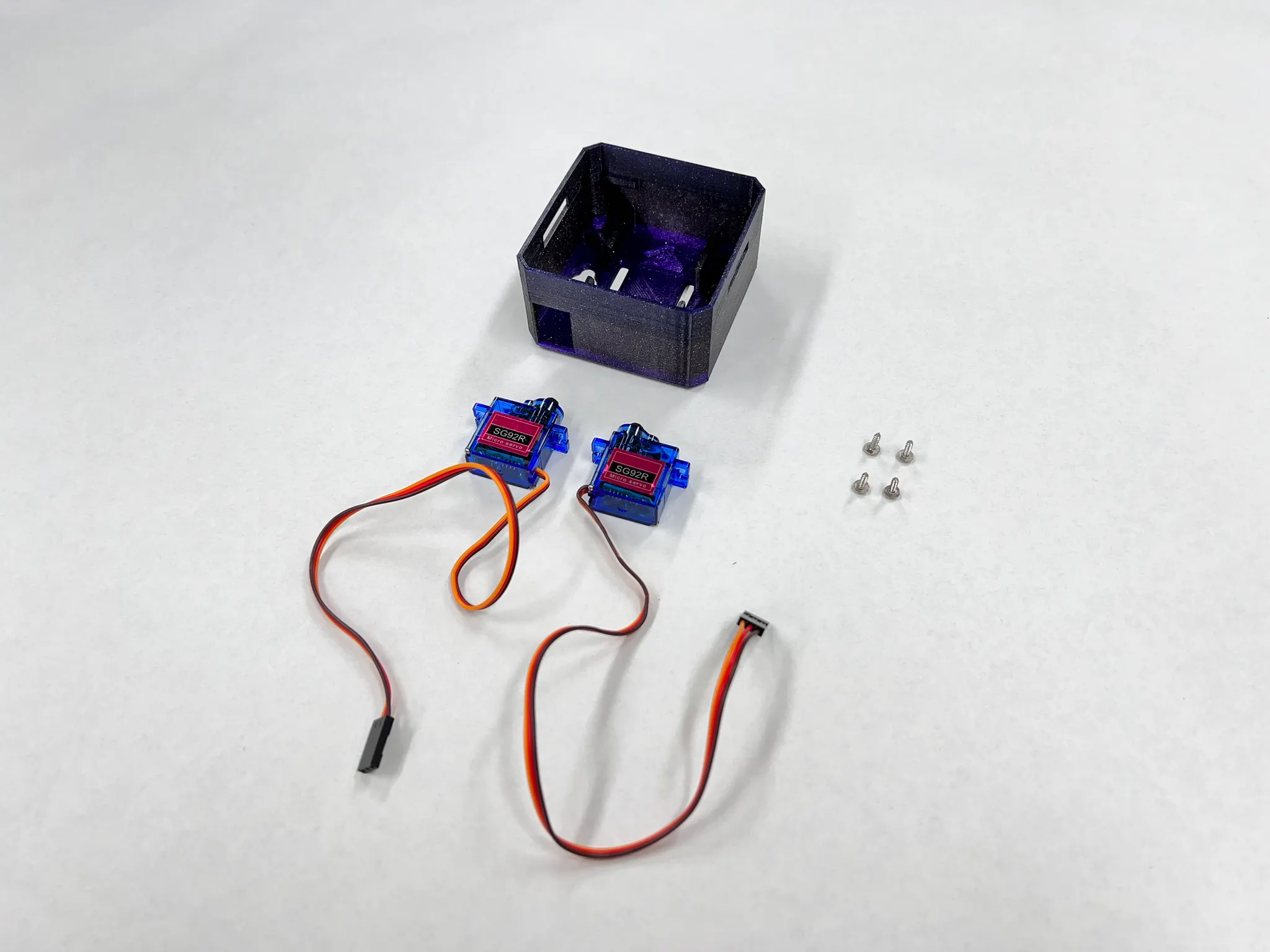
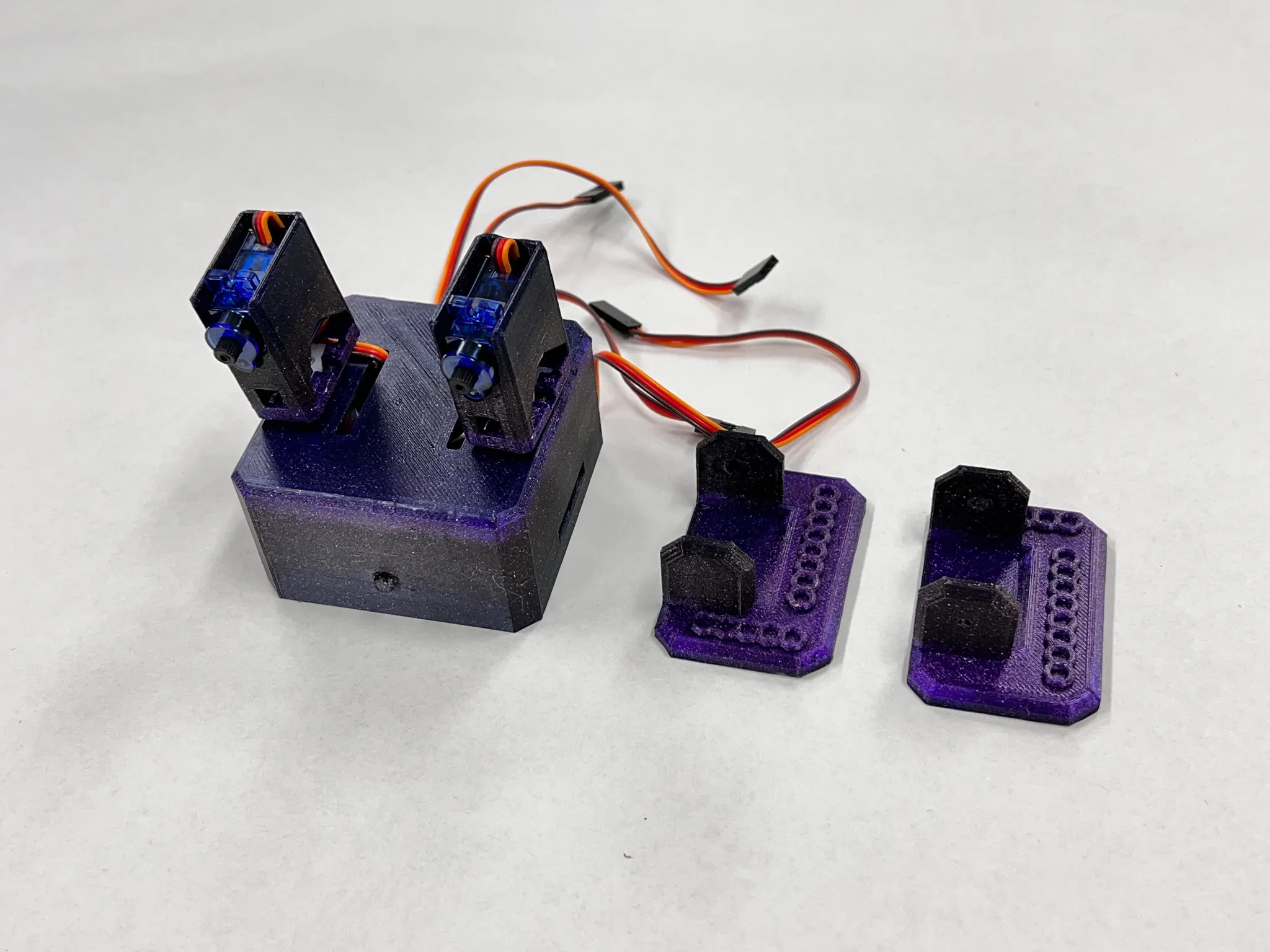
몸체 모터 조립
몸체, 서보모터 2개, 큰 나사 4개를 준비합니다.


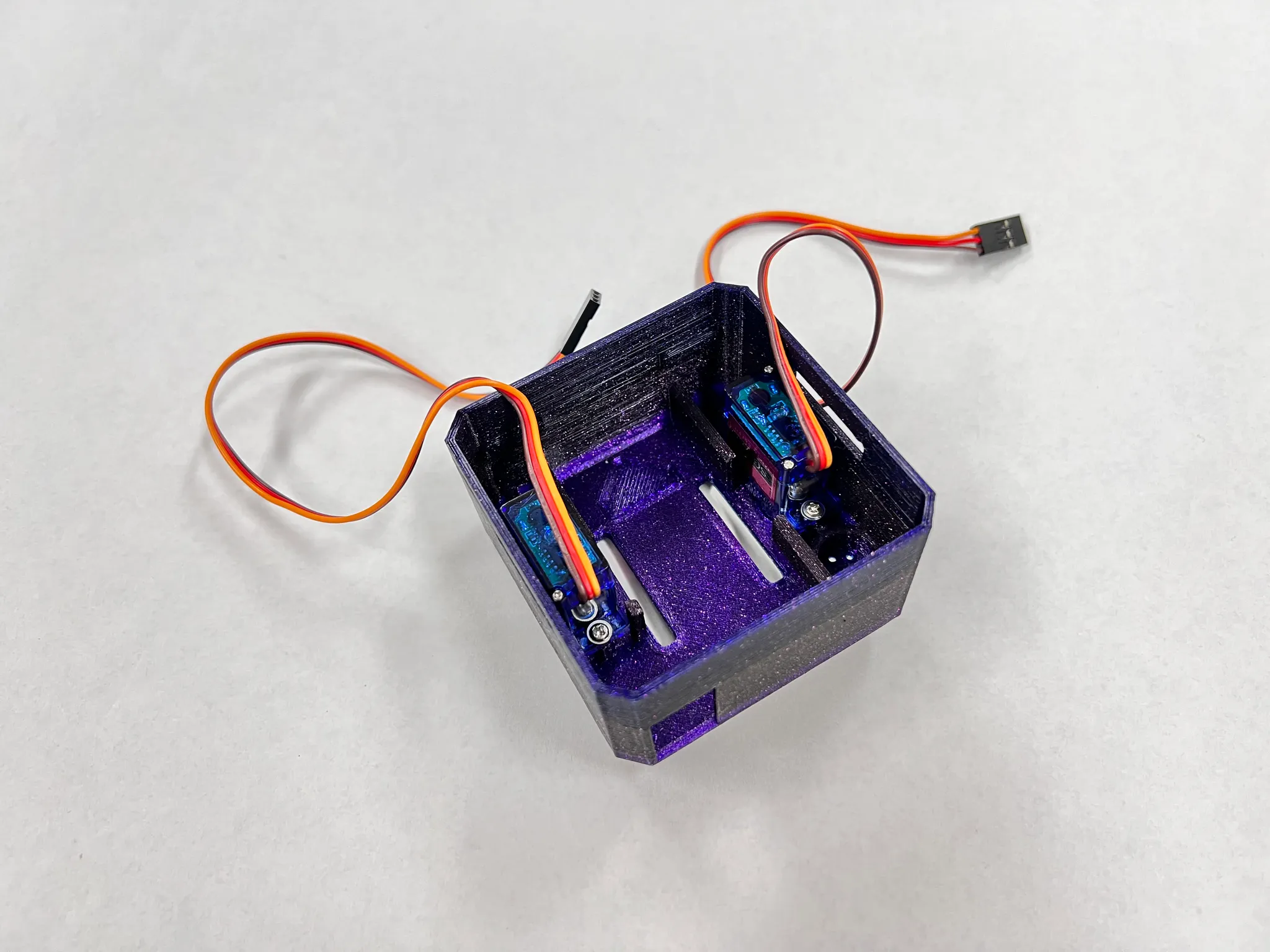
위치에 맞게 서보모터를 배치한 후 나사를 이용해 결합합니다.
다리 결합
앞서 조립한 몸체와 다리 부품 2개, 서보모터 혼 2개, 작은 나사 2개를 준비합니다.

몸체의 서보모터에 다리를 결합합니다.
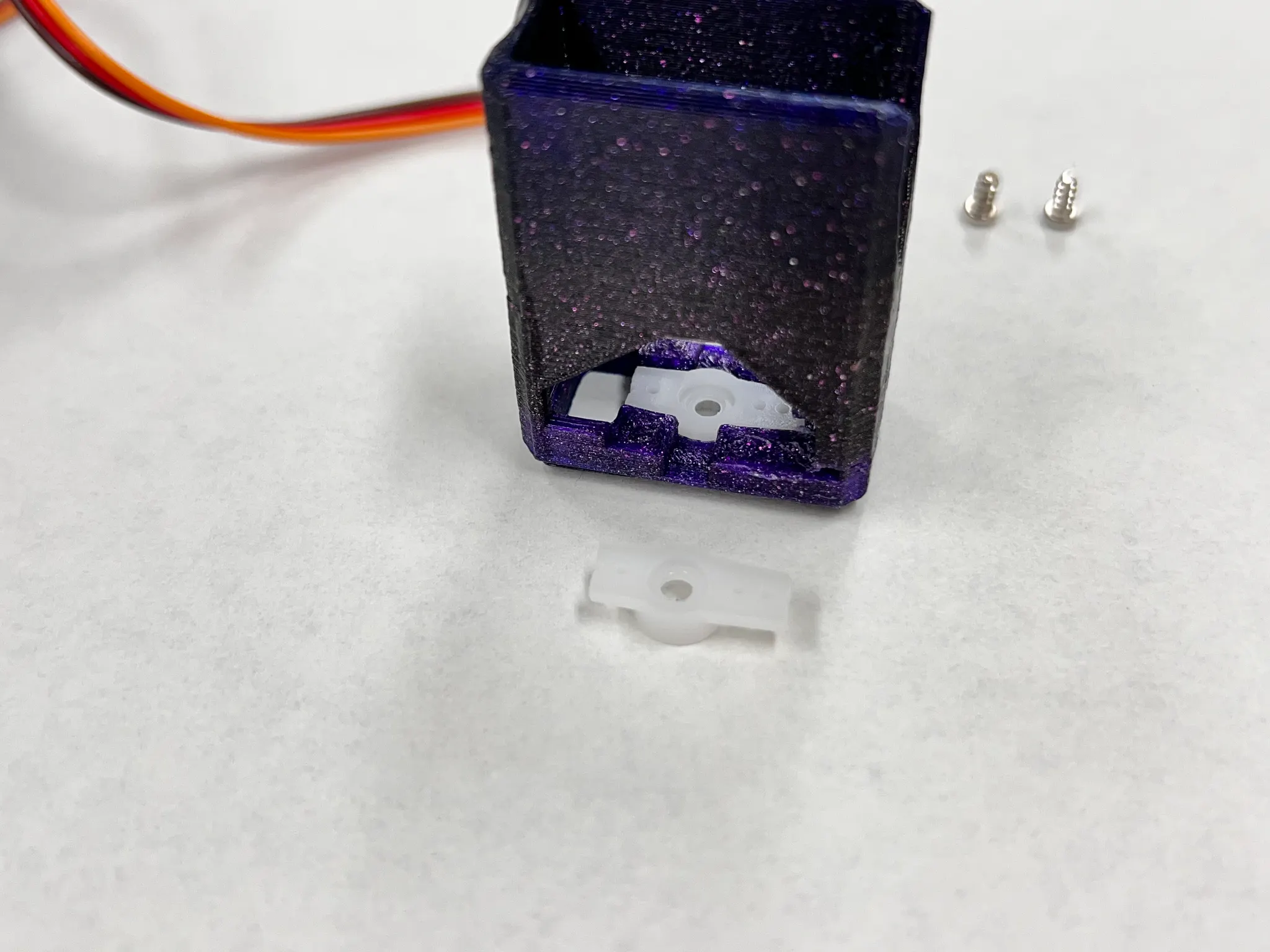
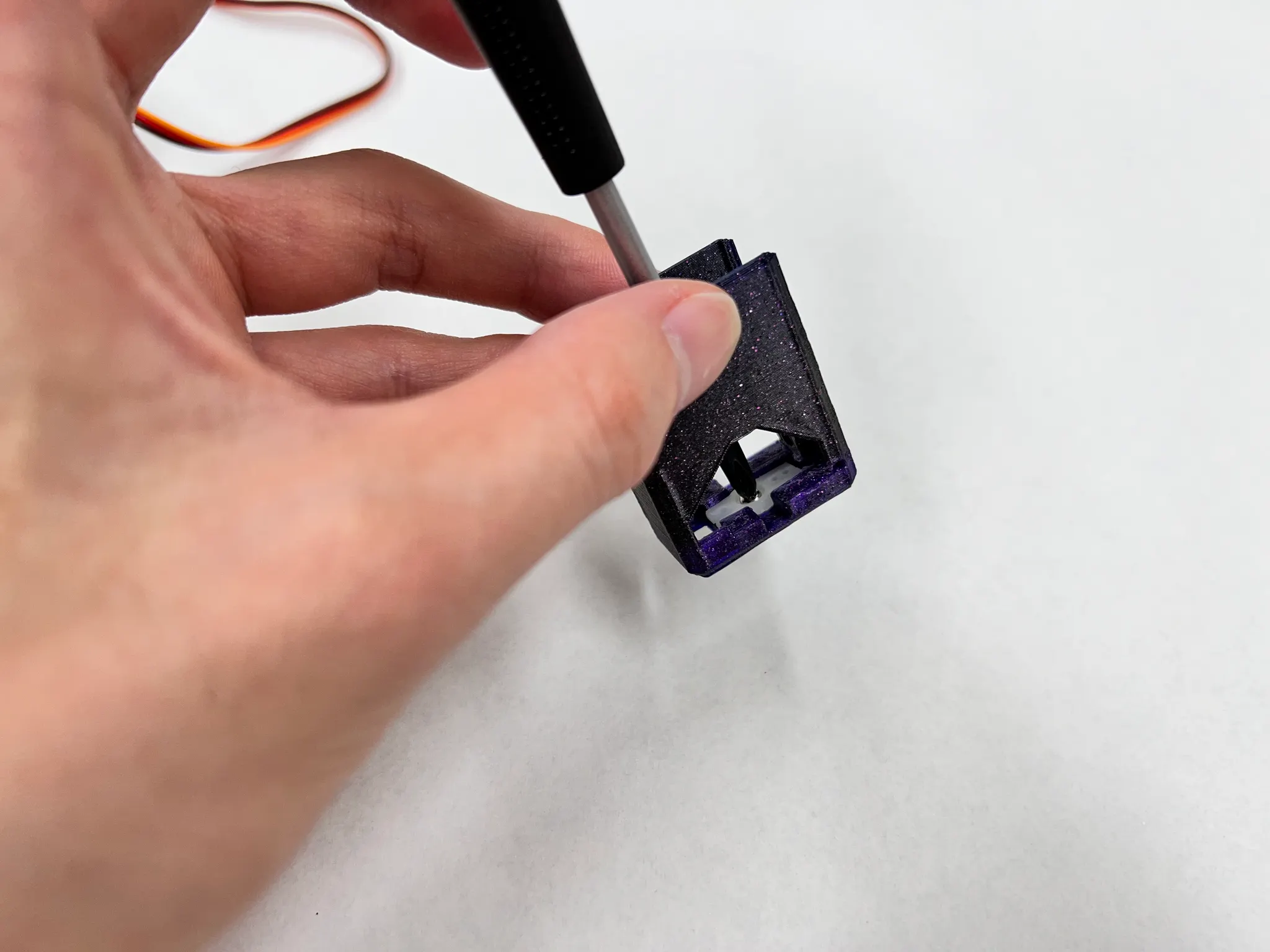
서보모터 혼을 다리에 방향을 주의하여 끼운 후 작은 나사를 이용해 몸체 서보모터에 고정합니다.
방향에 주의합니다. 몸체에 튀어나온 동그란 문향(코)이 있는 부분이 앞쪽입니다.
다리와 서보모터 사이에 유격이 존재합니다. 순간접착제를 활용해 서보모터 혼과 다리 부품을 고정하면 해결할 수 있으나, 이대로 두어도 큰 문제는 없습니다.
다리 서보모터 결합

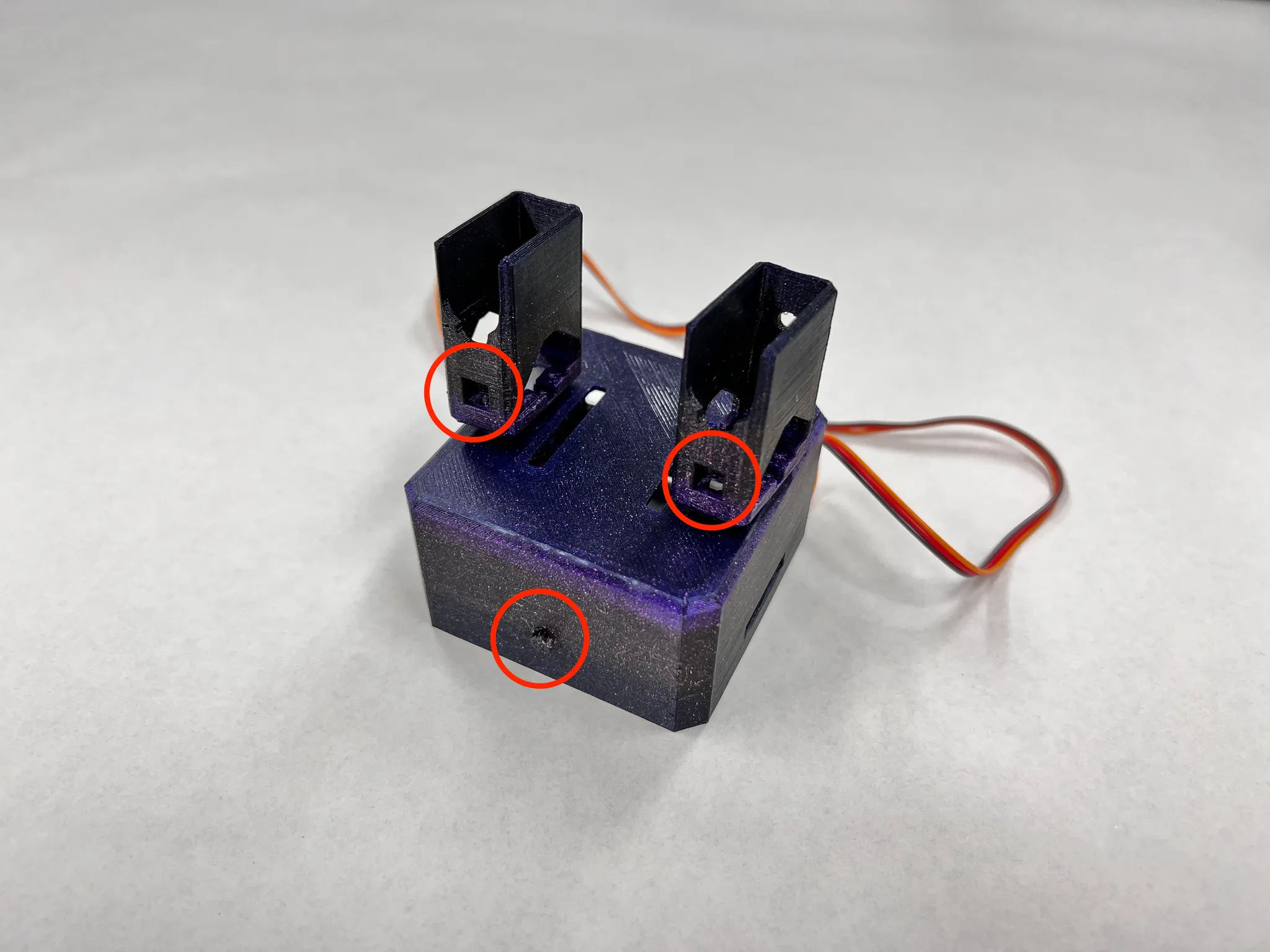
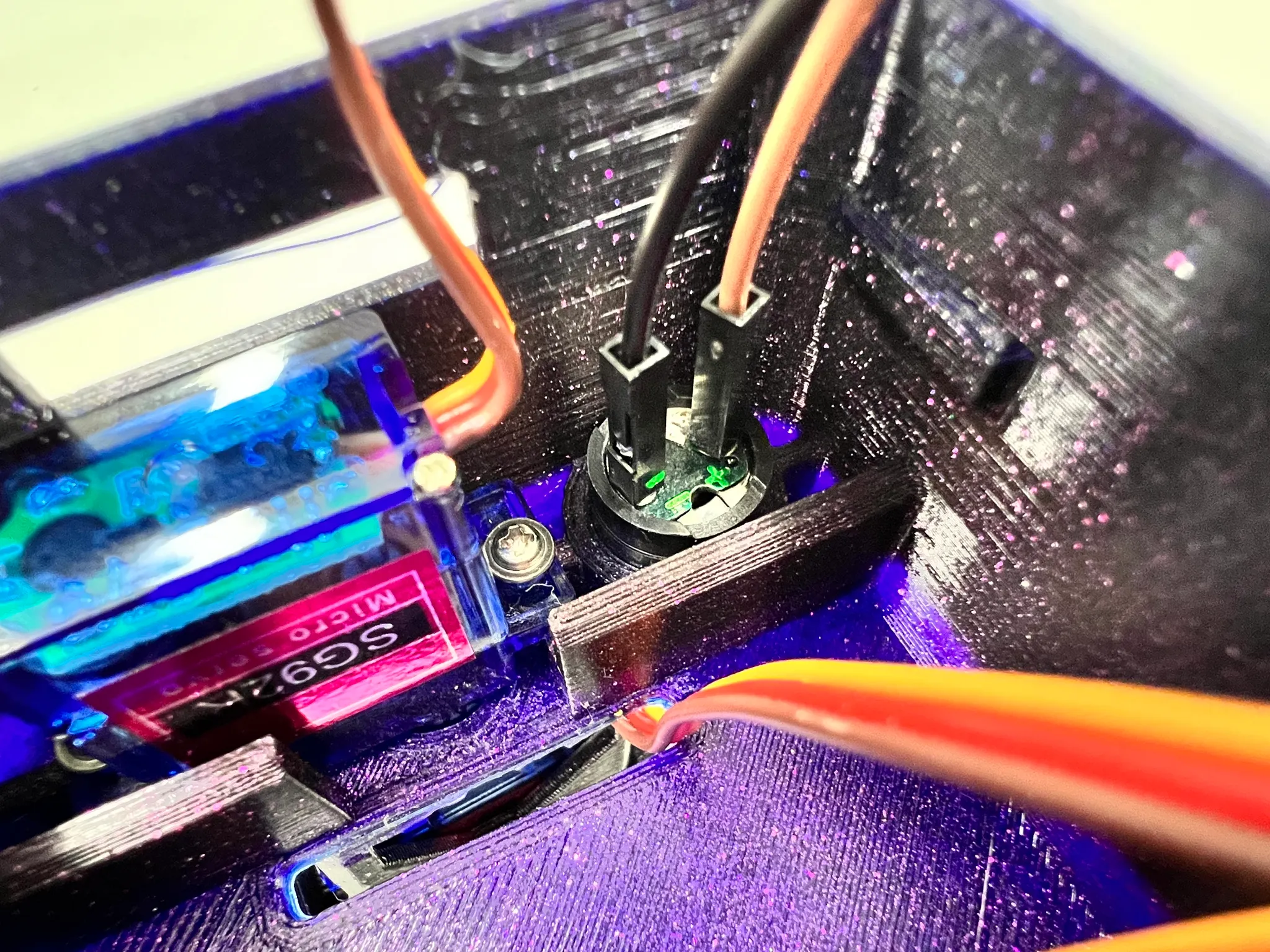
다리를 90도 돌려줍니다. 오른쪽 사진에서 표시한 부분에 케이블이 통과할 수 있도록 정렬합니다.
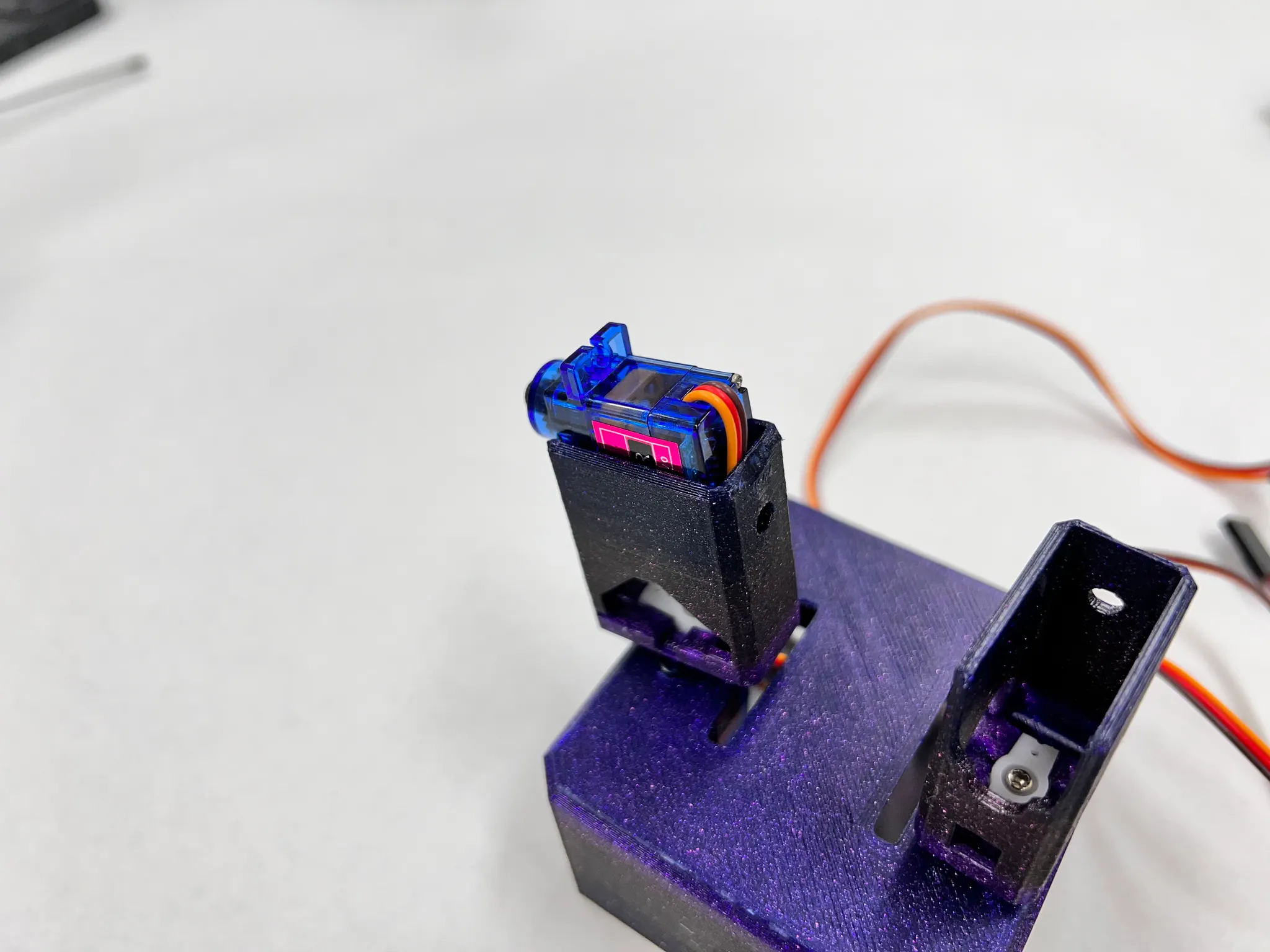
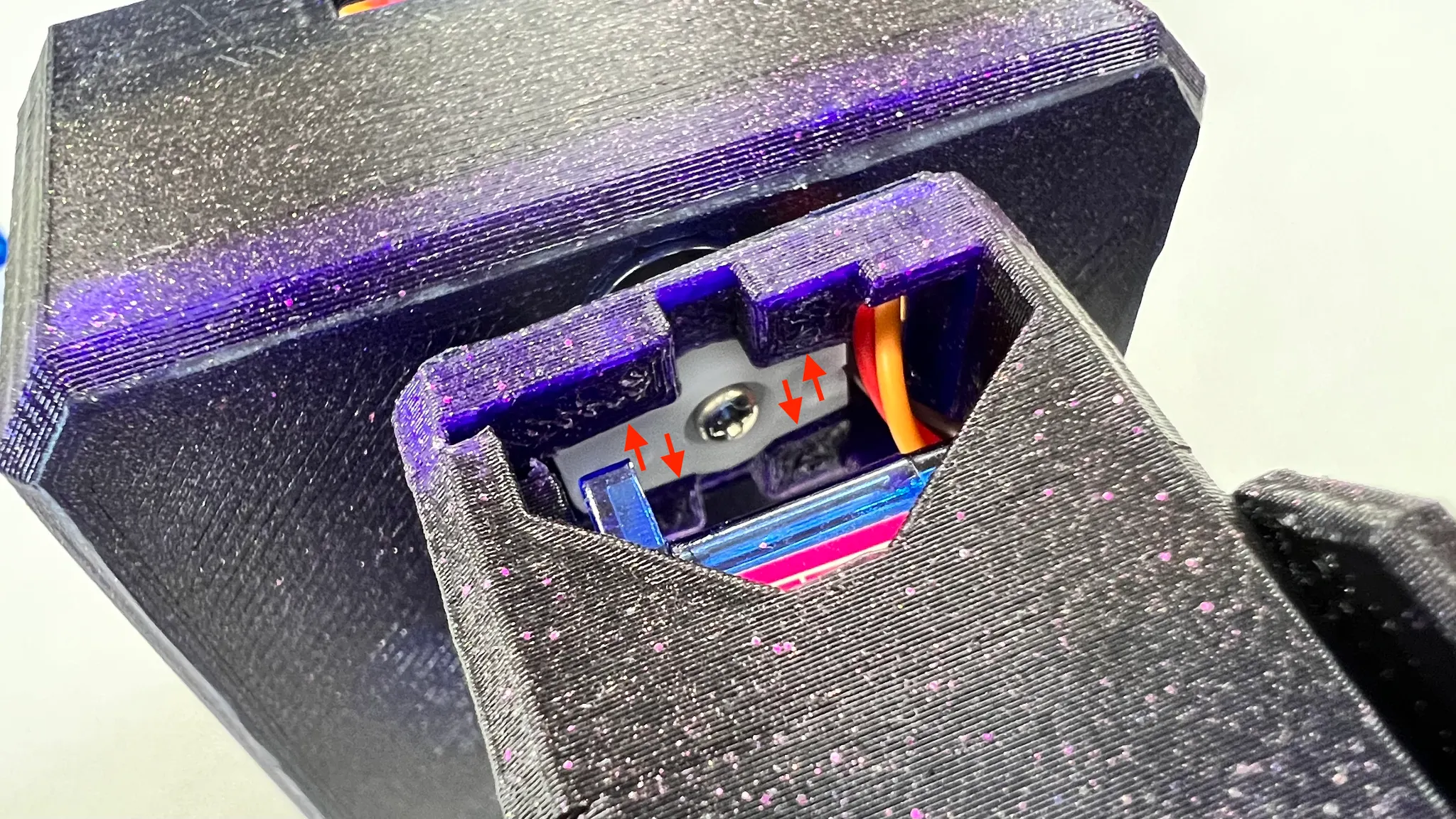
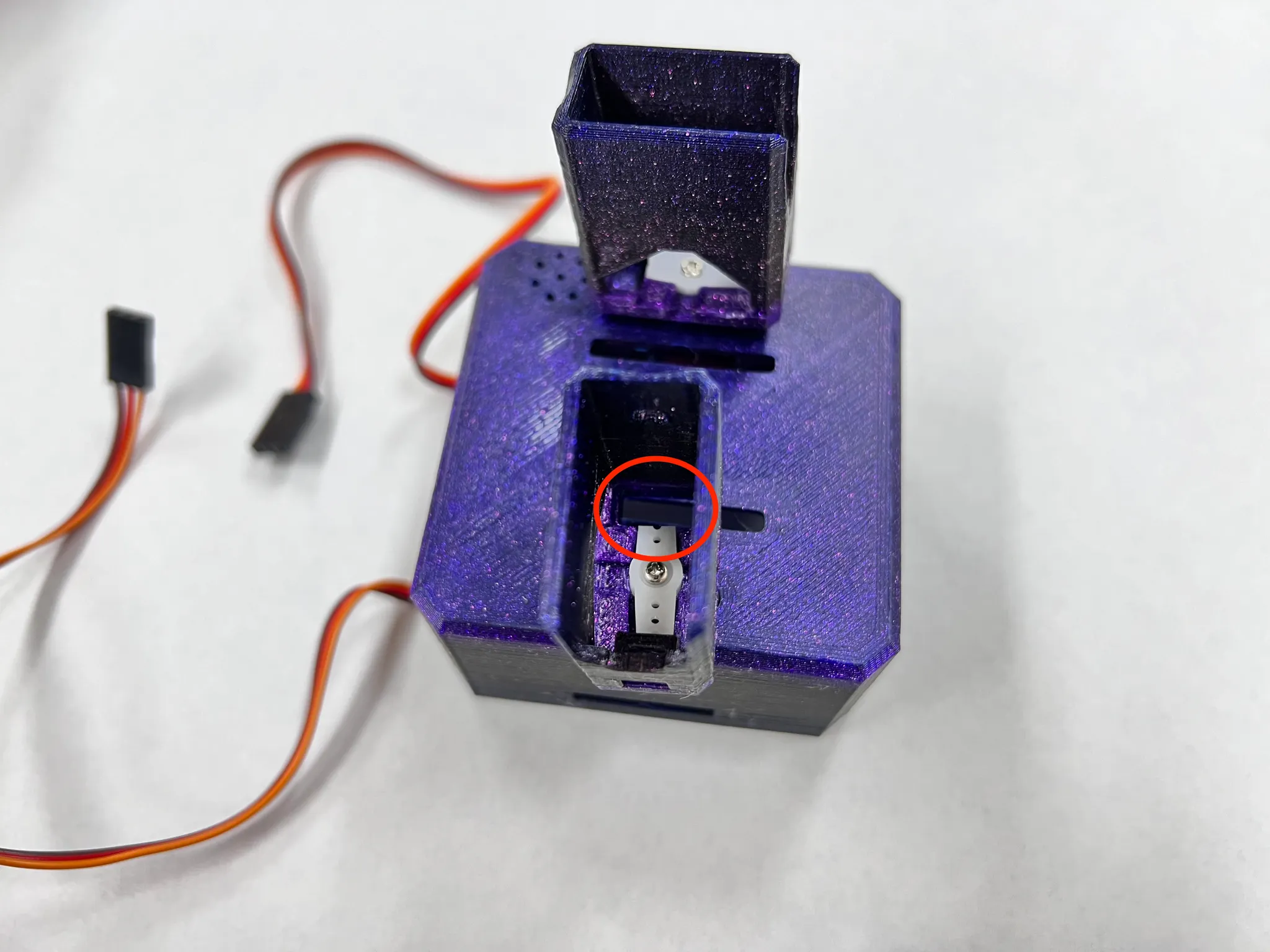
케이블을 통과시켜준 후 모터를 결합합니다. 이때 모터 방향에 유의합니다. 모터에서 케이블이 나오는 부분이 사진을 기준으로 윗쪽으로 향하고, 케이블은 모터의 뒷쪽을 감싸는 방향입니다.


양쪽 모터 모두 다리에 끼워줍니다.
발 결합
앞서 조립한 몸체와 발 부품 2개를 준비합니다.
방향에 주의하며 다리에 발을 결합합니다.
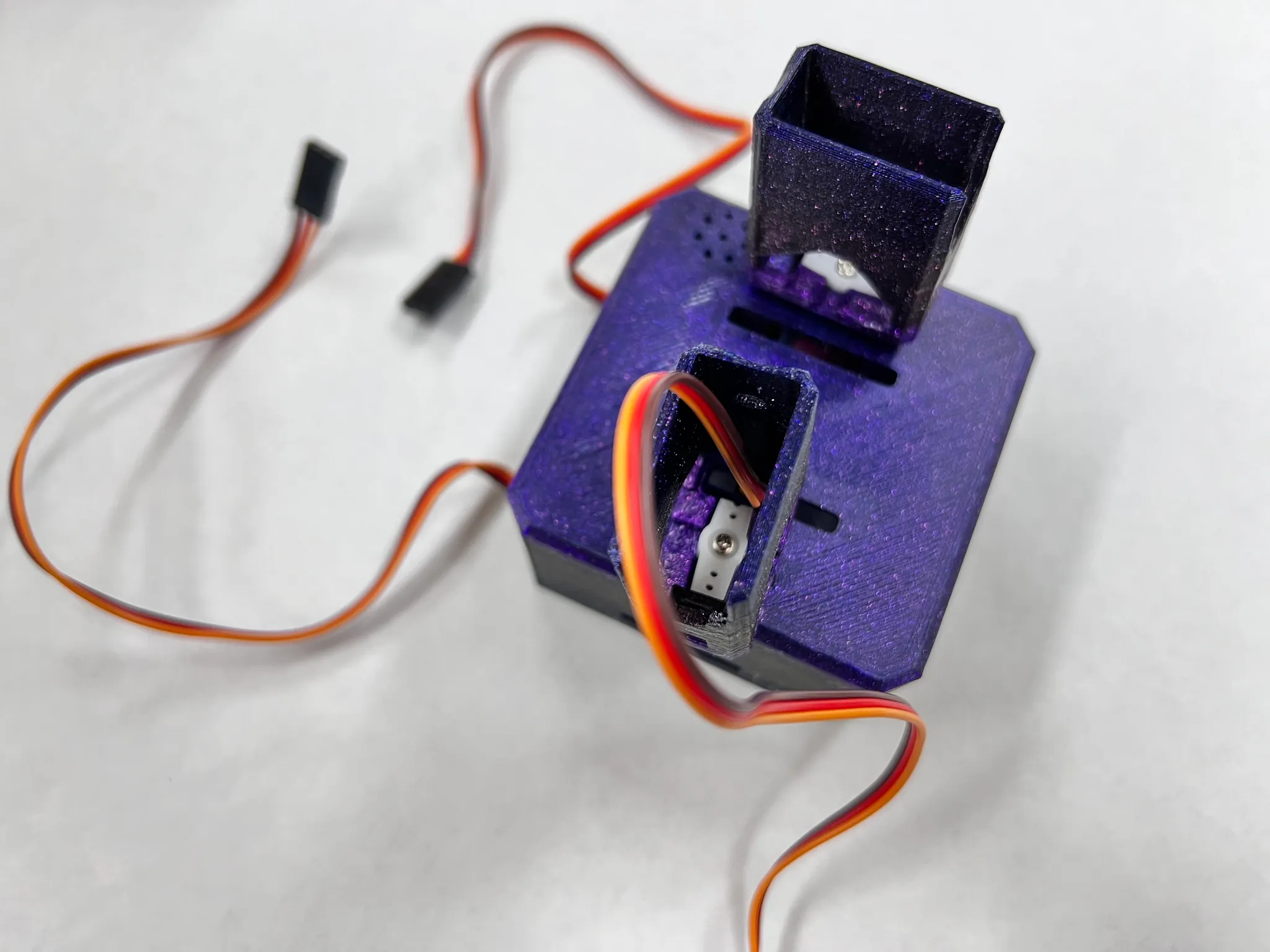
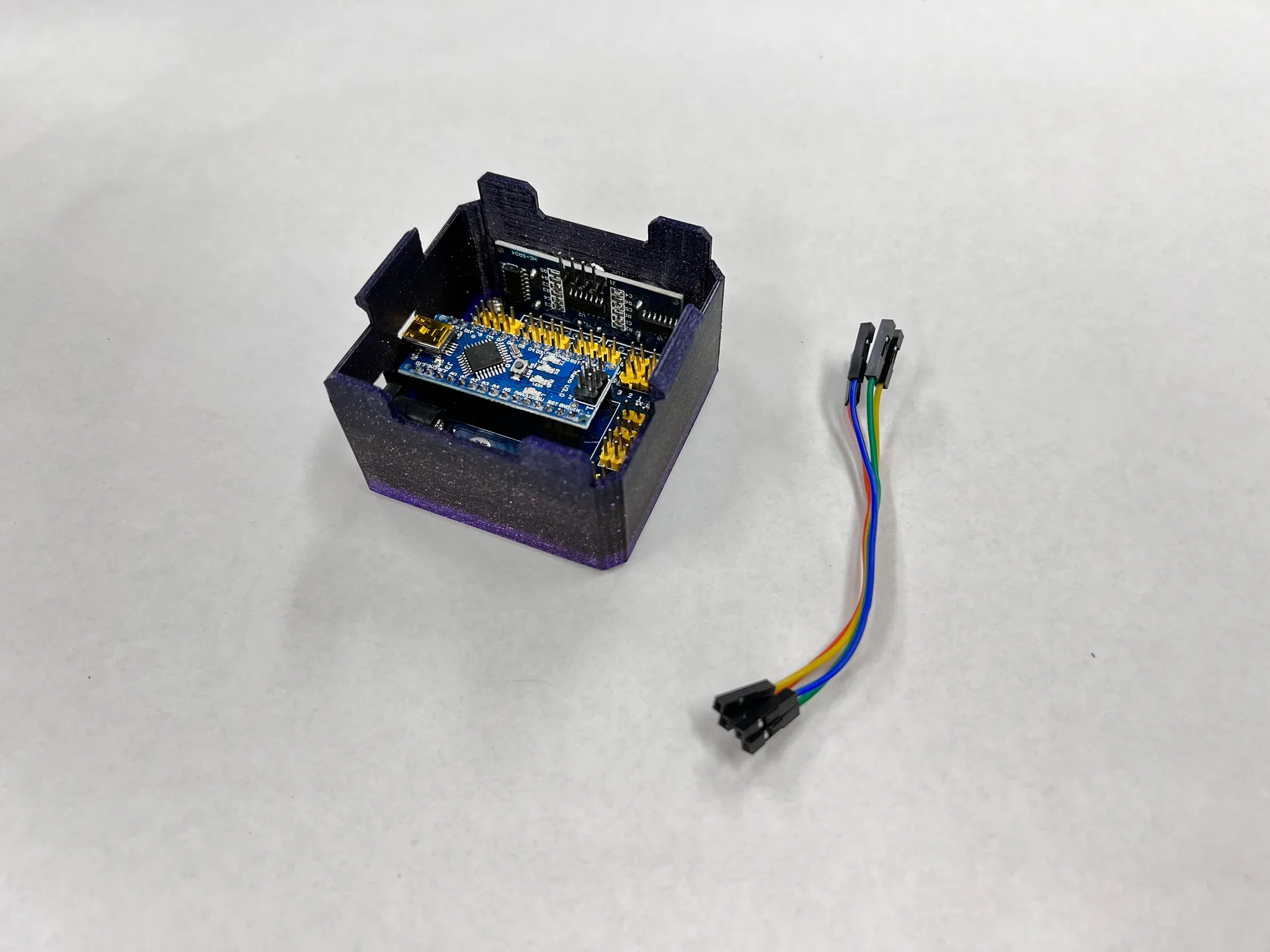
회로 결합
머리와 메인 기판, 초음파 센서를 준비하고 큰 나사 4개를 이용해 이를 결합합니다.



우선 초음파 센서를 머리의 앞쪽 구멍에 밀어넣습니다.
다음으로 메인 회로를 머리 바닥에 배치해 줍니다. 이때 공간이 협소해 오른쪽 사진과 같이 비스듬하게 넣어주어야 잘 들어갑니다.

나사 4개를 이용해 메인 회로를 머리에 고정합니다.
배선 - 초음파 센서
케이블 4개와 앞서 조립한 머리를 준비합니다.
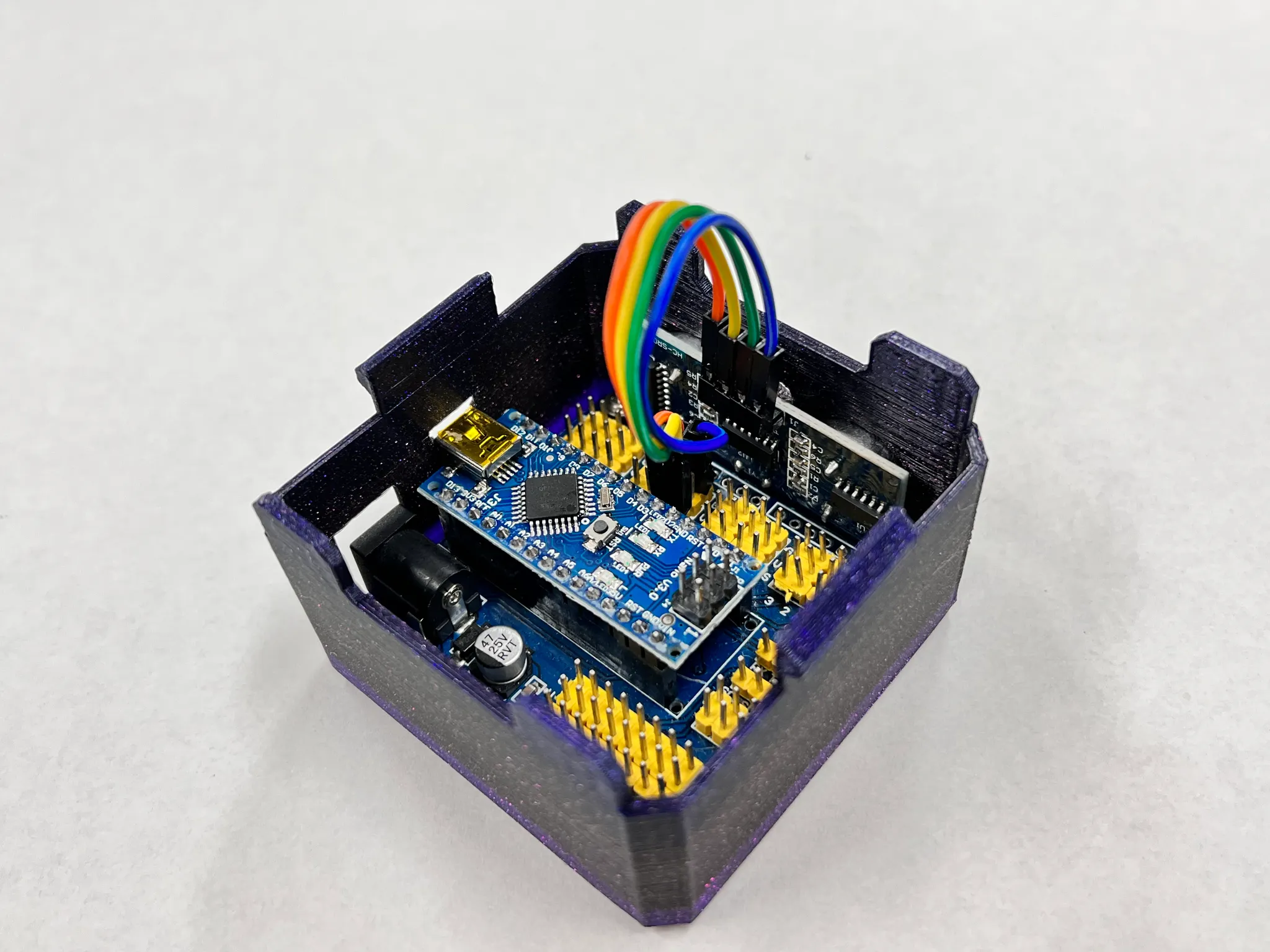
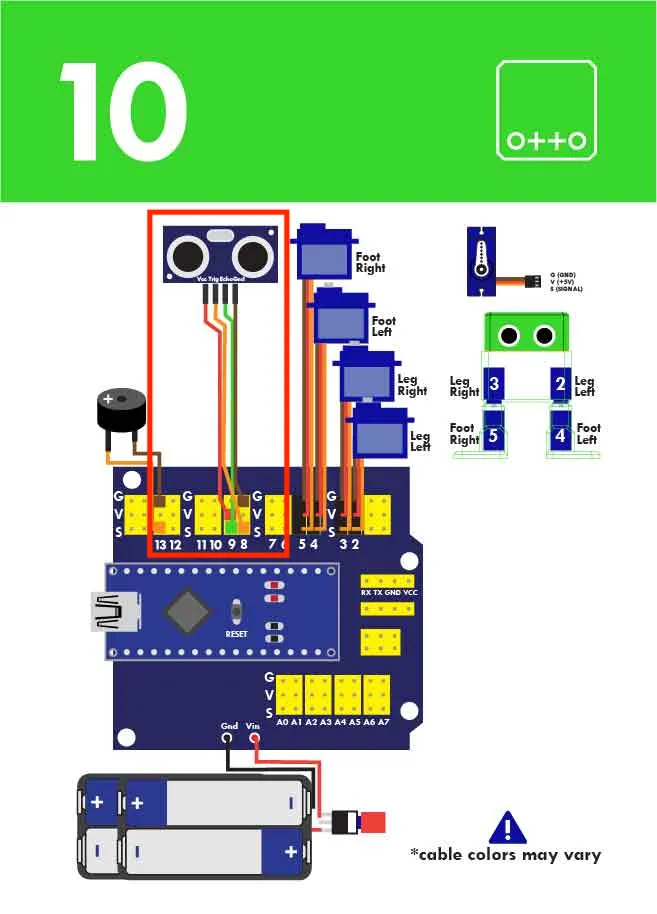
위 사진을 참고하여 초음파 센서를 배선합니다.
배선 - 서보모터
앞선 단계에서 조립했던 몸체와 머리를 준비합니다.

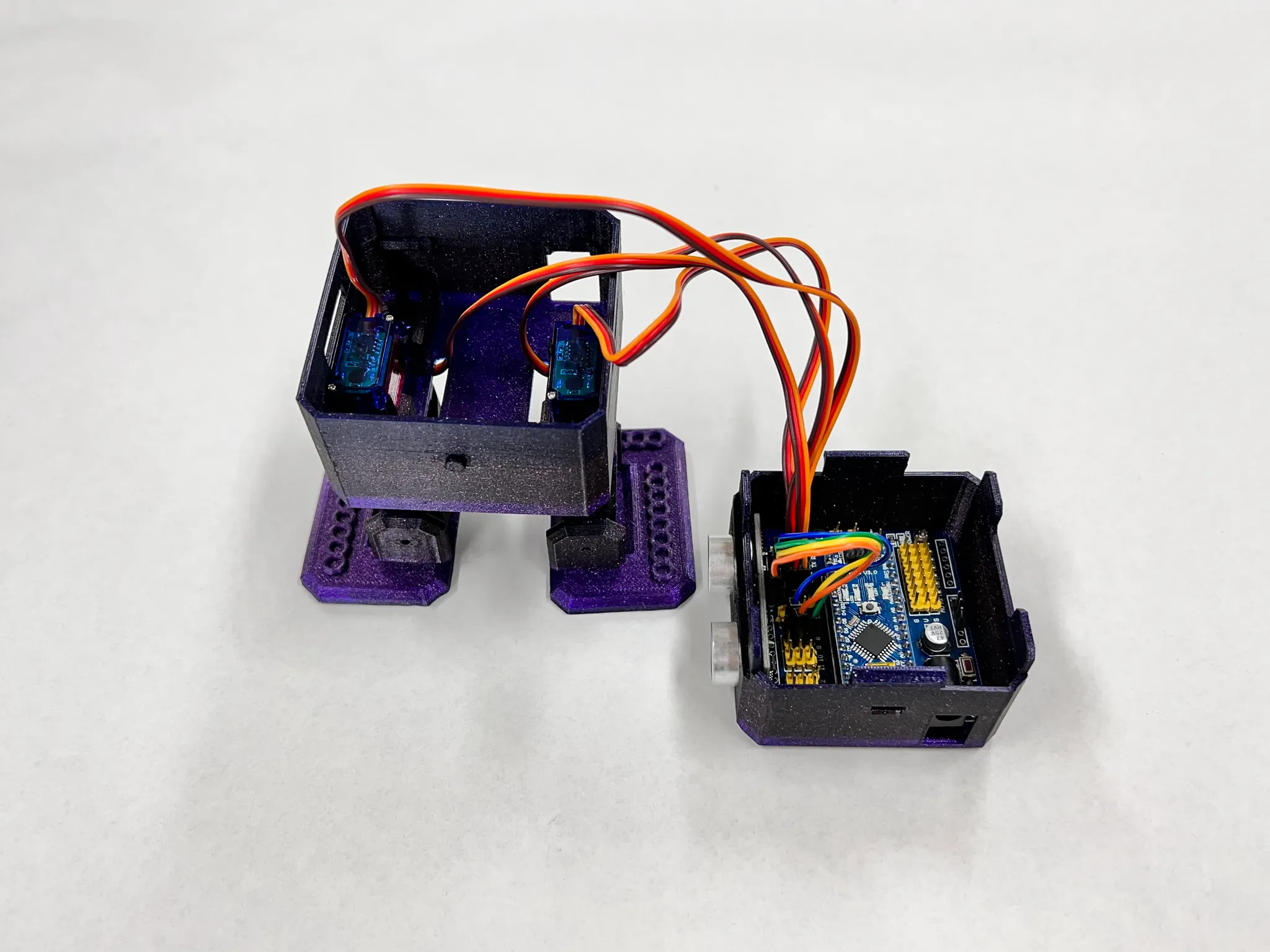
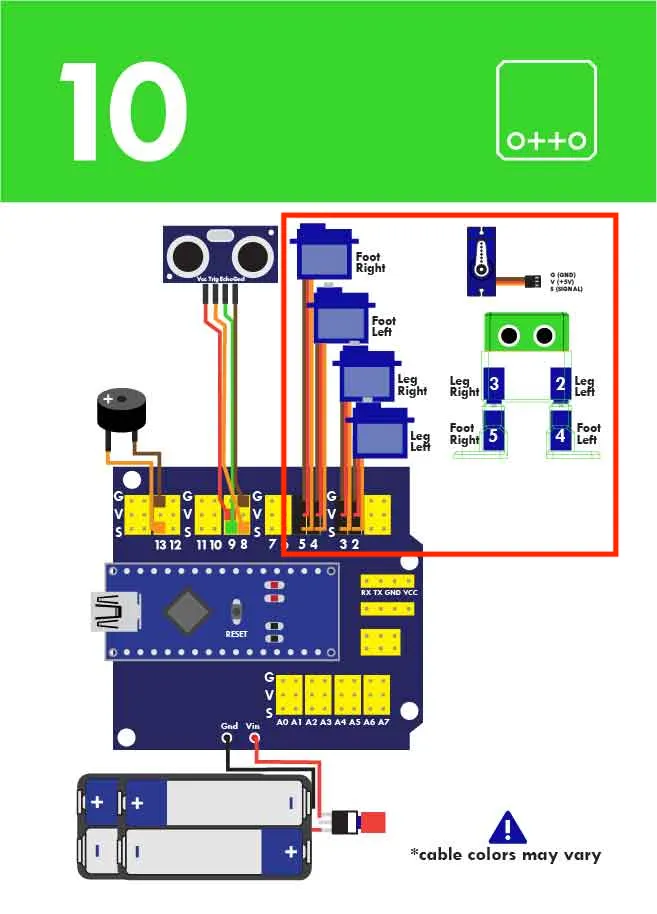
위 사진을 참고하여 서보모터 케이블을 올바른 위치에 연결합니다.
로봇을 전면에서 보았을 때를 기준으로 오른쪽 위 모터 2, 왼쪽 위 모터 3, 오른쪽 아래 모터 4, 왼쪽 아래 모터 5 입니다.
배선 - 부저
수동 부저를 배선합니다.


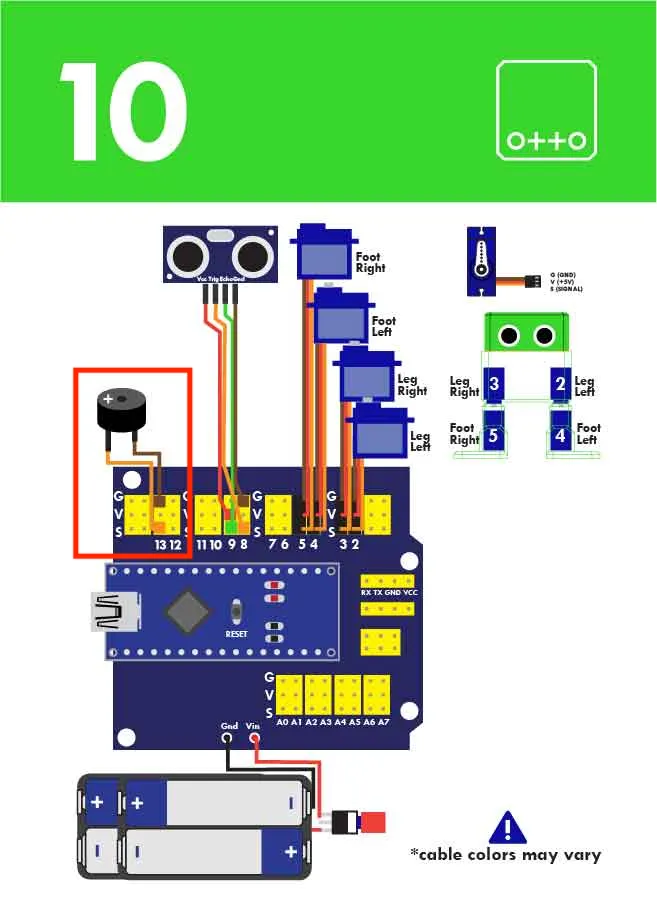
위 사진을 참고하여 부저를 배선합니다.
배선을 완료한 후에는 몸체 구석의 부저 위치에 부저를 끼워줍니다.
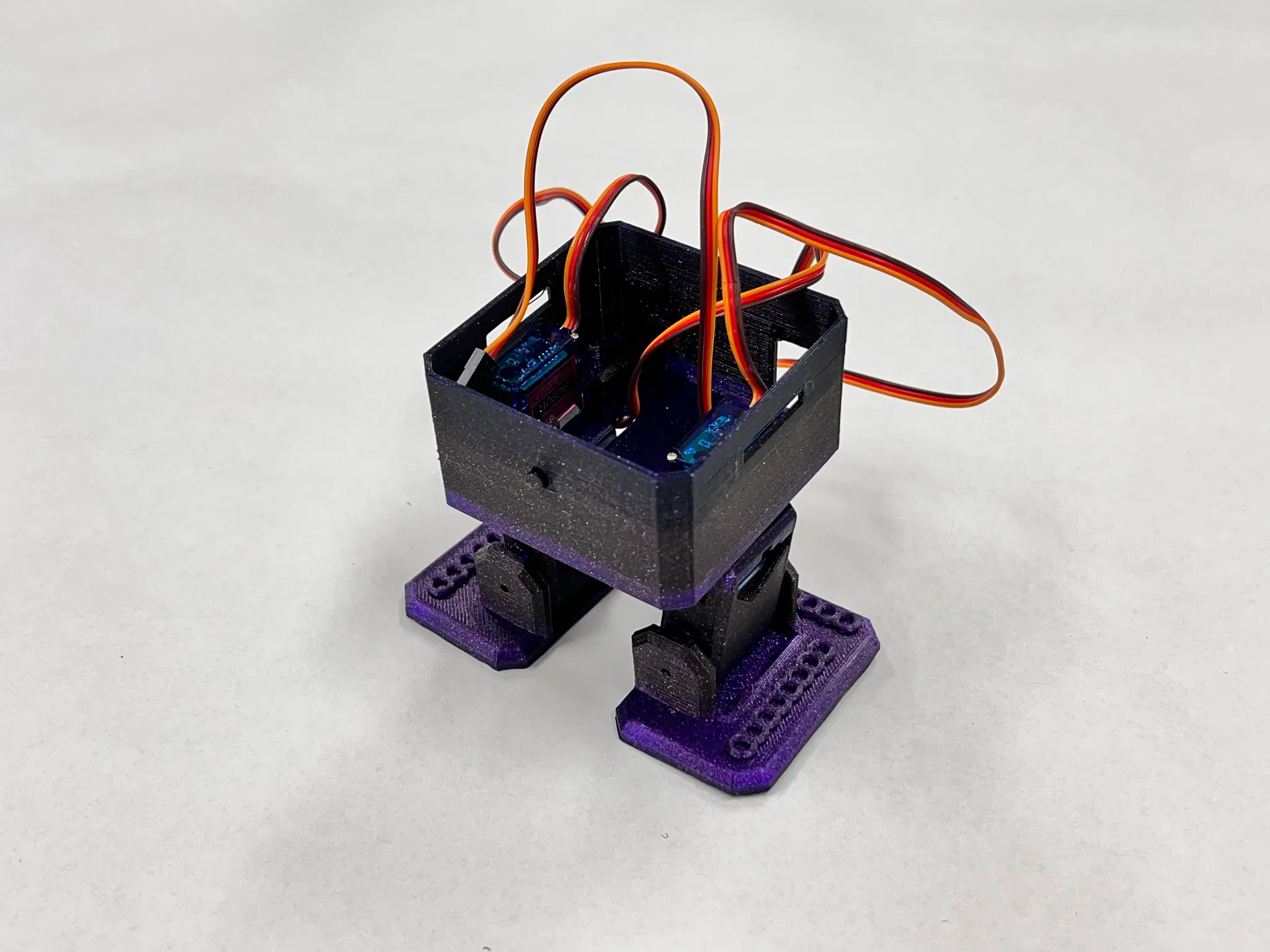
완성

배선이 모두 완료되었다면 케이블을 적절히 정리하여 몸체와 머리를 결합합니다.